
arduenna is an automatic directional-antenna alignment software using Arduino. arduenna consists of arduenna.sh (bash script for linux) and arduenna.ino (program running on Arduino). Hardware: linux PC with external wLAN-adapter and directional-antenna attached to it. Arduino Board (Uno, Mega, etc.), LCD (keypad) shield (optional), Servo.
arduenna is intended to track a directional-wifi-antenna to the direction of the strongest signal of a wifi access point. This is especially useful on a slightly moving (sailing) vessel on anchor where directional antennas are normally more or less useless due to the vessels movement.
to do: Find larger servo. At the moment the available servo is to small for the attachment of a directional-wlan-antenna…
license: This program is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation; either version 2 of the License, or any later version. This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.

arduenna software running on arduino and laptop
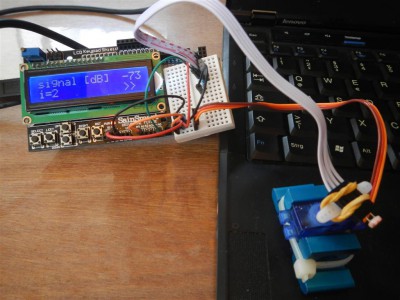
arduino steering the servo (no directional-wlan-antenna attached to servo so far)
bash script (linux):
#!/bin/bash
# arduenna v1.0, 16/01/27, Dr. Sven Seren
# arduenna is an automatic directional-antenna alignment software via arduino
# arduenna consists arduenna.sh (linux) and arduenna.ino (arduino)
# hardware: linux pc with external wlan-adapter and directional antenna attached to it
# arduino uno or arduino mega, LCD (keypad) shield (optional)
### variables and definitions ###
LOST=1
### text colours ###
RED=“\033[1;31m“
GREEN=“\033[1;32m“
YELLOW=“\033[1;33m“
BLUE=“\033[1;34m“
ENDCOLOR=“\033[0m“
### info ###
clear
echo
echo -e $RED“=====================“$ENDCOLOR
echo -e $YELLOW“=== arduenna by Ø ===“$ENDCOLOR
echo -e $RED“=====================“$ENDCOLOR
echo
echo -e $BLUE“automatic directional-antenna alignment via arduino“$ENDCOLOR
echo
### main ###
# echo -e $GREEN“[+] wlan NIC# ? [enter] = default (2)“$ENDCOLOR
# read -n 1 IFACE
# echo
# if [[ $IFACE == “ ]]; then
# IFACE=2
# fi
IFACE=$(iwgetid | cut -b 1-5)
if [[ $IFACE == “ ]]; then
echo -e $YELLOW“no connection available, connect and press [enter]“$ENDCOLOR
read -n 1
clear
./arduenna.sh
else
echo -e $YELLOW“using NIC: $IFACE“$ENDCOLOR
fi
echo
echo -e $YELLOW“initializing arduino communication…“$ENDCOLOR
stty -F /dev/ttyACM0 cs8 9600 ignbrk -brkint -icrnl -imaxbel -opost -onlcr -isig -icanon -iexten -echo -echoe -echok -echoctl -echoke noflsh -ixon -crtscts
if [ „$?“ != „0“ ]; then
echo -e $YELLOW“unable to connect to arduino, connect and press [enter]“$ENDCOLOR
read -n 1
clear
./arduenna.sh
else
echo -e $YELLOW“connection to arduino initialized“$ENDCOLOR
fi
echo
sleep 1;
while [ true ]; do
DECIBEL=$(iwconfig $IFACE | grep ‚Signal level=‘ | cut -b 44-47)
# QUALITY=$((2*($DECIBEL+100)))
if [[ $DECIBEL == “ ]]; then
echo -ne $YELLOW“connection lost, waiting for signal…\033[0K\r“$ENDCOLOR
echo $LOST > /dev/ttyACM0
else
echo -ne $YELLOW“signal [dB]: $DECIBEL\033[0K\r“$ENDCOLOR
# echo -ne $YELLOW“signal [dB and %]: $DECIBEL\033[0K $QUALITY\033[0K\r“$ENDCOLOR
echo $DECIBEL > /dev/ttyACM0
fi
sleep 1;
done
arduino program:
/*
arduenna v1.0, 16/01/27, Dr. Sven Seren
arduenna is an automatic directional-antenna alignment software via arduino
arduenna consists of arduenna.ino (aduino) and arduenna.sh (linux)
hardware: arduino uno or arduino mega, LCD (keypad) shield (optional), servo
servo (continuous rotating) on pin A1
*/
// definition of libaries
#include <LiquidCrystal.h>
LiquidCrystal lcd(8, 9, 4, 5, 6, 7);
#include <Servo.h>
Servo servo; // define servo
// definition of constants and variables
#define servo_pin A1 // pin for servo
#define servo_step_width 25 // time (us) servo is on
#define servo_delay 1000 // waiting time (us) after servo movement until measurement
int i=1; // counter variable
int serial_value=1;
int pin_value_actual=1; // variables for signal maximum detection
int pin_value_left=1;
int pin_value_right=1;
int pin_value_center=1;
void setup() {
Serial.begin(9600); // start serial connection library
lcd.begin(16, 2); // start LCD library
lcd.clear();
servo.attach(servo_pin); // attach servo to pin
servo_stop(); // stop servo movement
display_banner(); // show software info on LCD
}
// display banner
void display_banner () {
lcd.clear();
lcd.setCursor(0, 0); lcd.print(“ blue-felix.de“);
lcd.setCursor(0, 1); lcd.print(“ arduenna v1.0″);
delay(2000);
lcd.clear();
}
// motion routines for servo (continuous rotation): 0 rotate in one direction, 180 in opposite direction, 90 stop
int servo_step_left(int n) {
for (int i=1; i<=n; i++) {
servo.write(100);
delay(servo_step_width);
servo.write(90); }
}
int servo_step_right(int n) {
for (int i=1; i<=n; i++) {
servo.write(80);
delay(servo_step_width);
servo.write(90); }
}
void servo_stop() {
servo.write(90);
}
// function for tracking antenna signal with servo
int servo_track_signal(int n) {
lcd.setCursor(13, 1); lcd.print(„<< „);
servo_step_left(n);
delay(servo_delay);
pin_value_left=Serial.parseInt();
lcd.setCursor(13, 0); lcd.print(pin_value_left);
lcd.setCursor(13, 1); lcd.print(„>> „);
servo_step_right(n);
delay(servo_delay);
lcd.setCursor(13, 1); lcd.print(„>> „);
servo_step_right(n);
delay(servo_delay);
pin_value_right=Serial.parseInt();
lcd.setCursor(13, 0); lcd.print(pin_value_right);
lcd.setCursor(13, 1); lcd.print(„<< „);
servo_step_left(n);
lcd.setCursor(13, 1); lcd.print(„<> „);
delay(servo_delay);
pin_value_center=Serial.parseInt();
lcd.setCursor(13, 0); lcd.print(pin_value_center);
if (pin_value_left > pin_value_center) {
lcd.setCursor(13, 1); lcd.print(„<<<„);
servo_step_left(n);
}
if (pin_value_right > pin_value_center) {
lcd.setCursor(13, 1); lcd.print(„>>>“);
servo_step_right(n);
}
}
// function for serial communication with linux bash script and call of function servo_track_signal()
void check_serial()
{
int n;
if (Serial.available() > 0)
{
serial_value = Serial.parseInt();
if (serial_value == 1) // check for antenna signal present
{ lcd.clear(); lcd.setCursor(0, 1); lcd.print(„wlan lost!“); servo_stop(); delay(500); lcd.clear();}
else
{ lcd.setCursor(0, 0); lcd.print(„signal [dB]“);
// lcd.setCursor(0, 1); lcd.print(„i=“); lcd.setCursor(2, 1); lcd.print(i); // display loop counter
if (i==1) { n=5; } // make one larger movement after 7 fine movements
if (i>1 && i<8) { n=1; }
if (i>=8) { i=0; }
servo_track_signal(n);
i=i+1;
}
}
else {lcd.clear(); lcd.setCursor(0, 1); lcd.print(„no data!“); servo_stop(); delay(500); lcd.clear();} // check for linux script running
}
// main loop
void loop() {
check_serial();
delay(500);
}